MBD
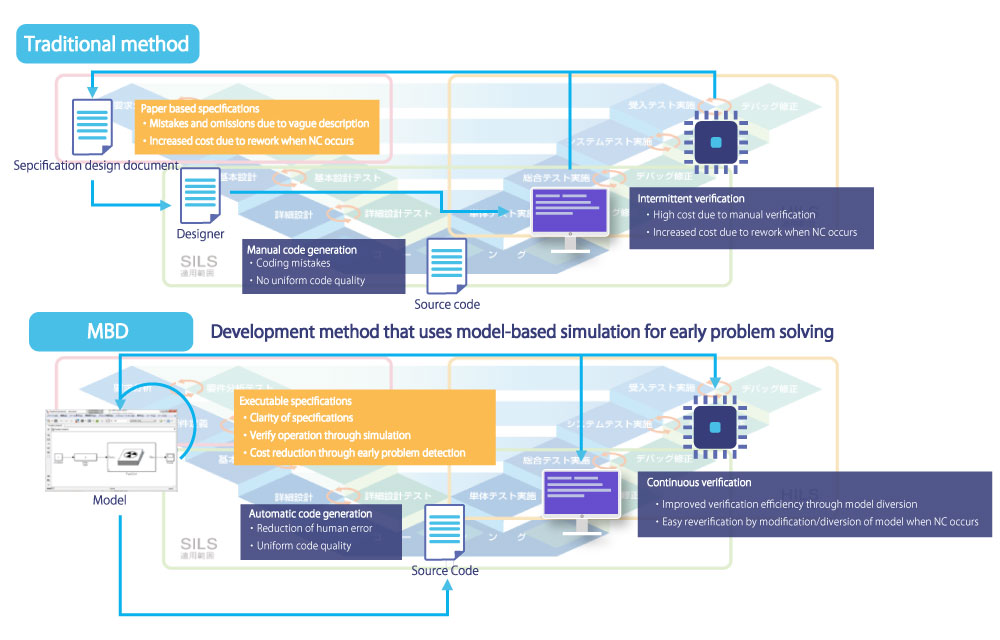
MBD is
MBD(Model Base Development) is a method to create model from given specifications and to execute simulations starting from specification design phase itself. This helps in early resolution of problems such as specification defects and supports high quality development in a short period of time. It is also called Model Base Development because the model created in specification design phase can be used in subsequent phases such as automatic code generation from the model during coding phase and test data generation from the model during testing phase, etc..
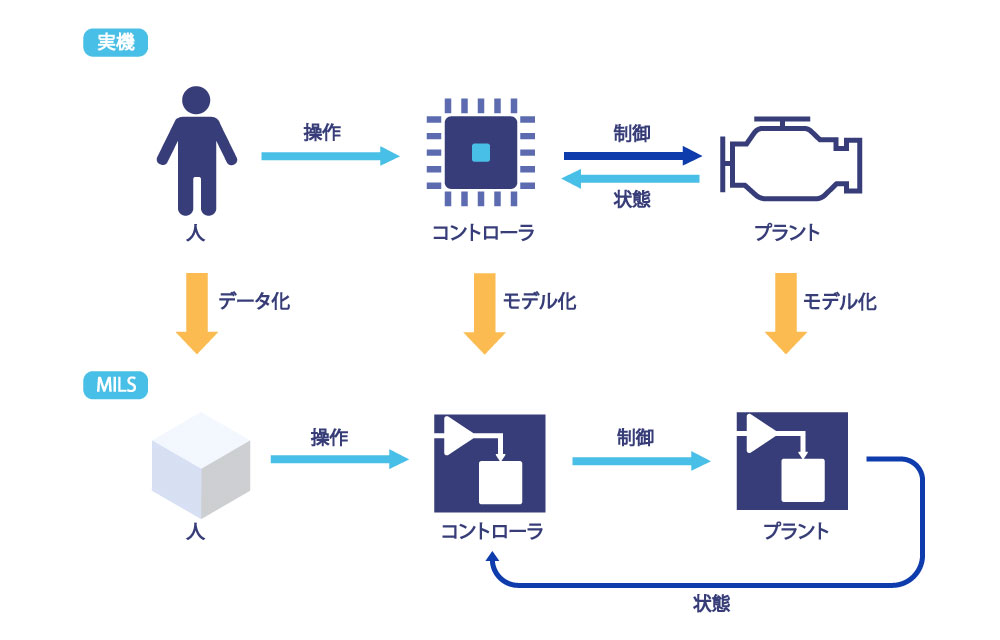
MILS
MILS (Model In the Loop Simulation) is a model in which both the controlled object (plant) and the controlling device (controller) are created as models using Simulink.It is a development method for verifying operations by simulating feedback control between a plant and a controller.This makes it possible for controlled development and verification without the actual machine.
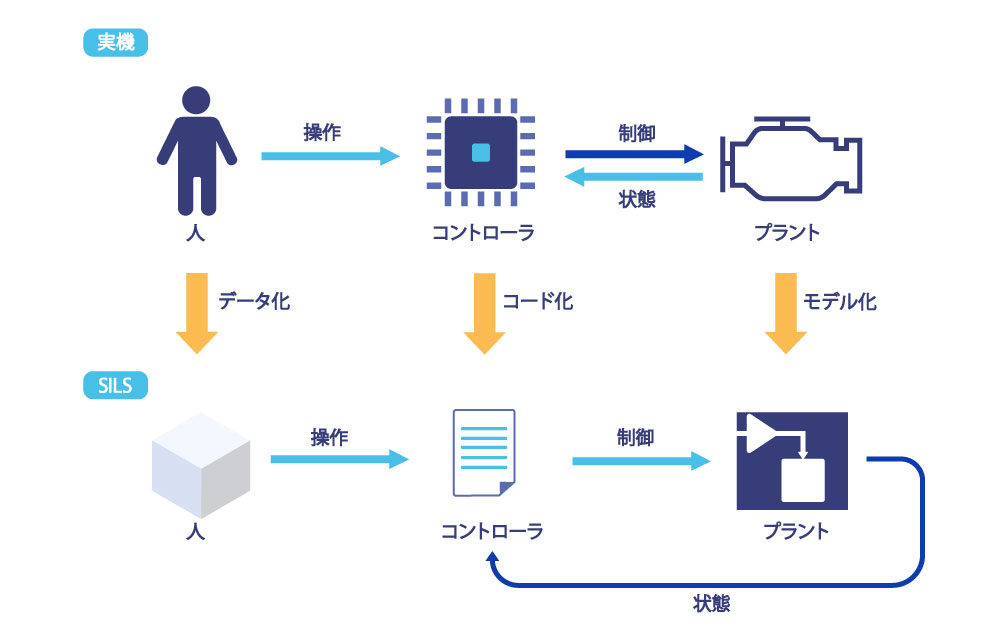
SILS
SILS (Software In the Loop Simulation) is a model in which controlling device (controller) is created in C language code(software) and controlled object (plant) is created as a model on Simulink.It is a development method for verifying operations by simulating feedback control between a plant and a controller. This makes it possible to develop and verify control algorithms similar to the final software.Another advantage is that existing software can be easily used.
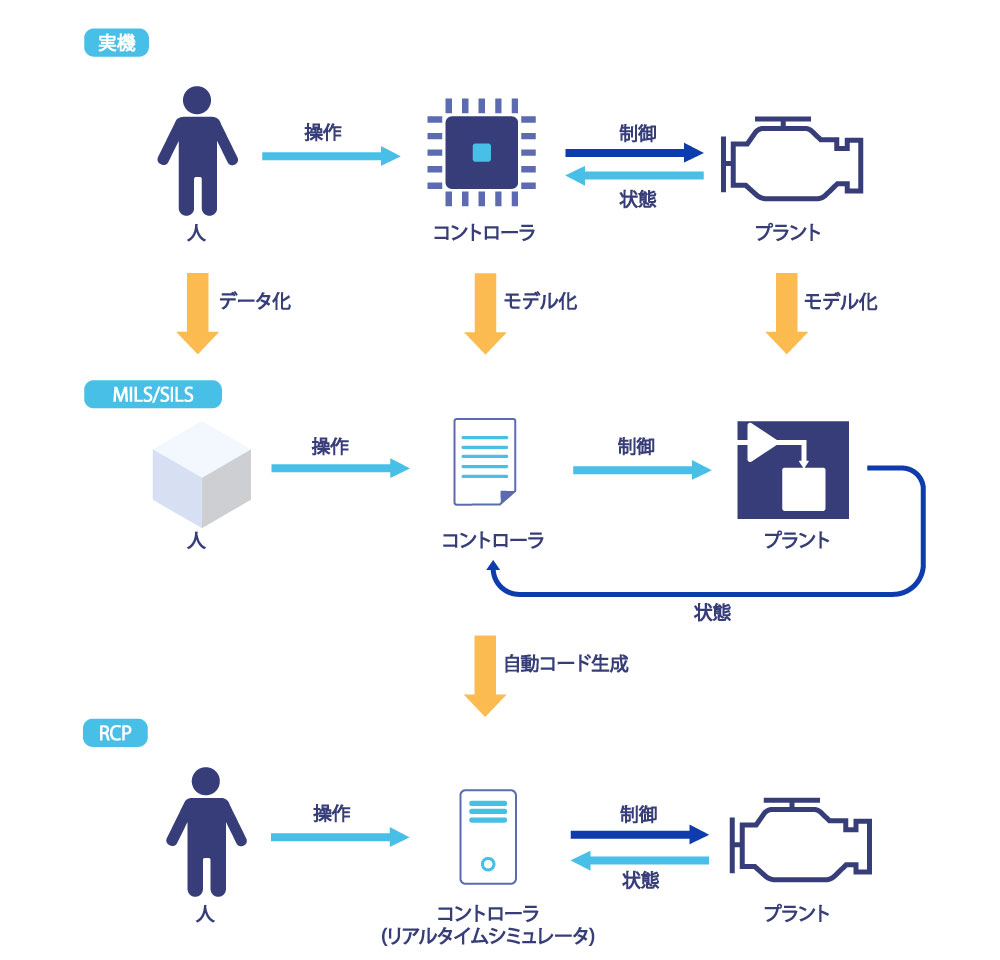
RCP
RCP (Rapid Control Prototyping) is a development method in which algorithm is automatically generated in C language code(software) for a controlling device (controller) constructed with a Simulink model and the generated code is loaded in real-time simulator to verify operation using the control target(plant) of the actual machine.This enables verification in a real time environment before the control device is completed and enables early detection of problems such as timing dependency, interrupts/exceptions that are difficult to find by simulation.
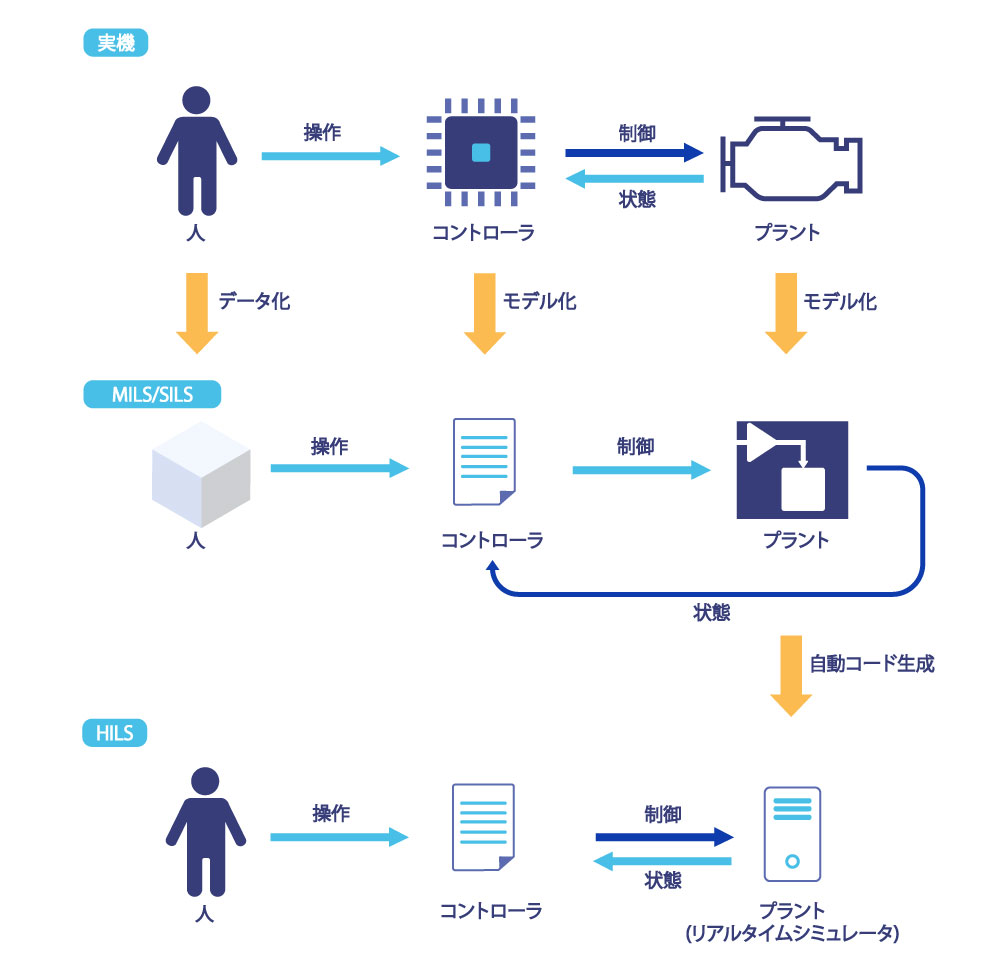
HILS
HILS (Hardware in the loop simulation) is a development method in which the control target (plant) constructed by Simulink model is automatically generated in C language code and.the generated code is loaded in real-time simulator to verify the operation of actual controlling device (controller).This makes it possible to verify with a real machine before the control target(plant) is completed, which shortens the development period and enables early detection of problems.
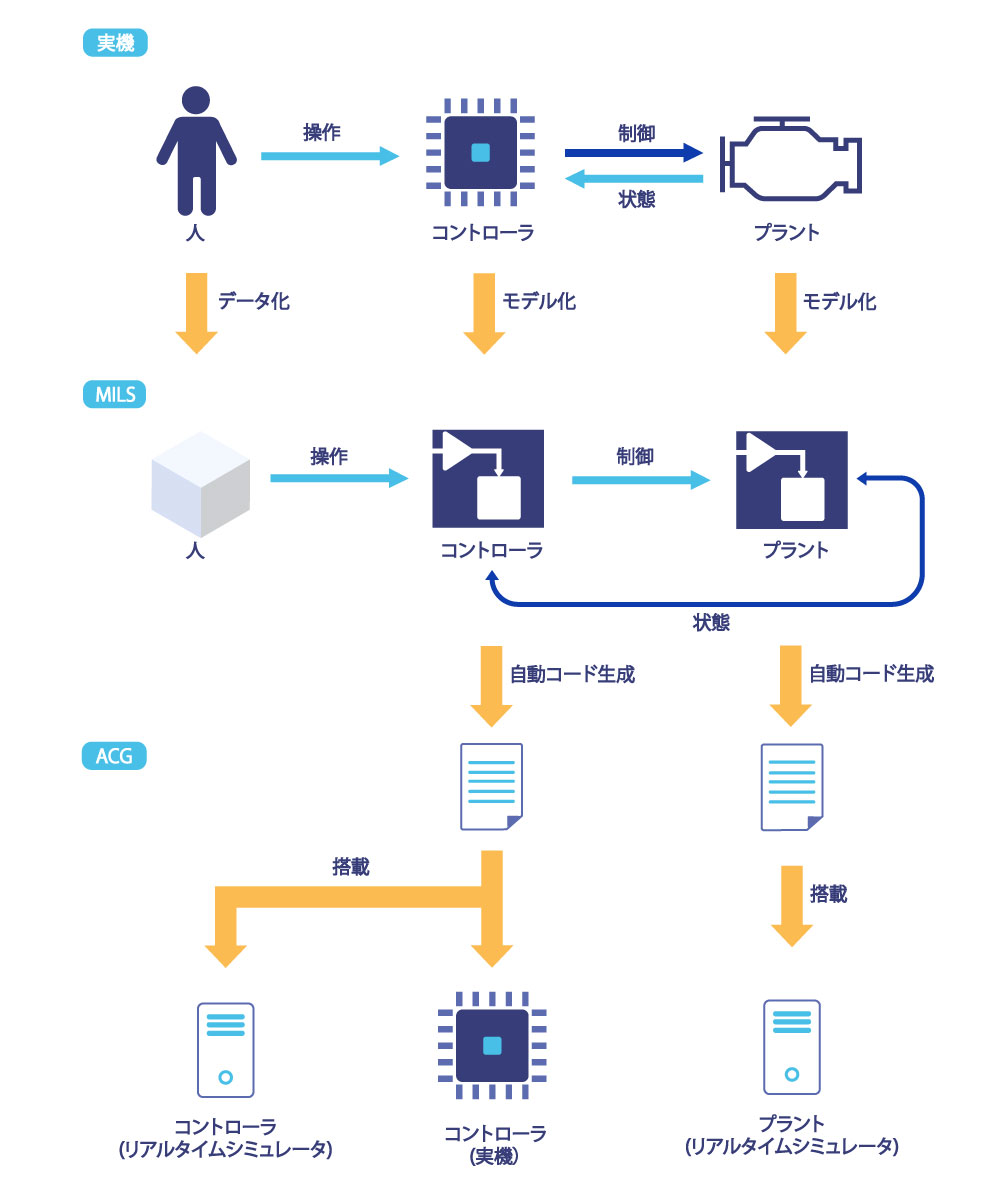
ACG
ACG (Auto Code Generation) is a technology that automatically generates controlled object (plant) and controlling device (controller) constructed with Simulink model into C language code.Since the code is automatically generated, problems that are often caused by manual coding and variations caused due to differences in developers skill levels can be prevented.