

MATLAB/Simulink 加速度センサブロック開発 (2CH)
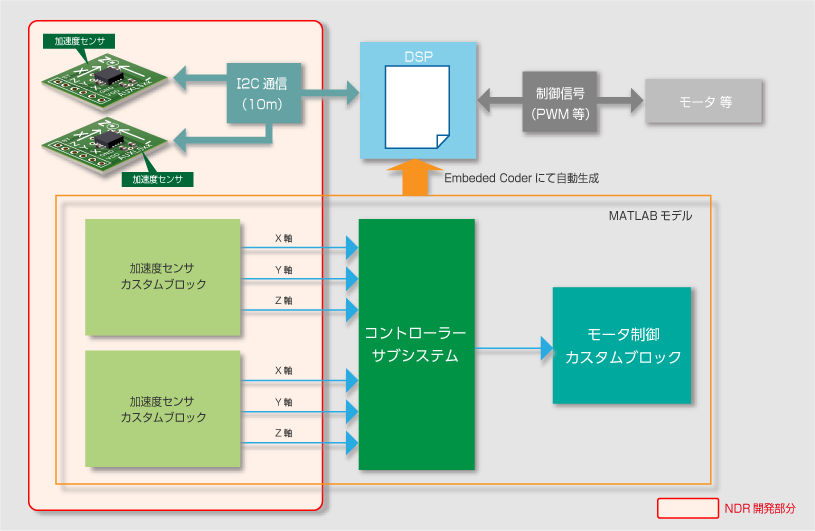
複数の加速度センサを長距離 (10m) の I2C 通信経由で制御する DSP ソフトを MATLAB/Simulink 上のカスタムブロックから作成する環境を実現。
シミュレーター開発
RCP+SILS
モデリング+環境構築
開発内容
お客様要望例
- 加速度センサを制御するための DSP に搭載するソフトを、
MATLAB モデルで作成したい - 長距離 (10m) 離れた複数の加速度センサを、一つのモデルで制御したい
NDR のソリューション
- MATLAB/Simulink 上で加速度センサ制御用カスタムブロックを作成
- I2C-Bus Differential Extender 経由で 10m 離れた DSP と加速度センサ間で I2C 通信を行うための治具を作成
特徴
カスタムブロック作成
- MATLAB/Simulink 上のカスタムブロックを設定するだけで、DSP 制御ソフトをカスタム可能
- I2C 通信のプロトコルは Embeded Coder で対応しており、上位レイヤーの通信内容を対応
- 加速度センサ個数の増加に対して、スレーブアドレスを
指定する機能を追加することで対応
I2C 通信用ジグ作成
- 長距離 (10m) の I2C 通信を実現