

Construction of various model-based development environments
Support for model-based development which we NDR are possible to provide because of our knowledge of the actual machine environment
Construction of Model-based Development Environment
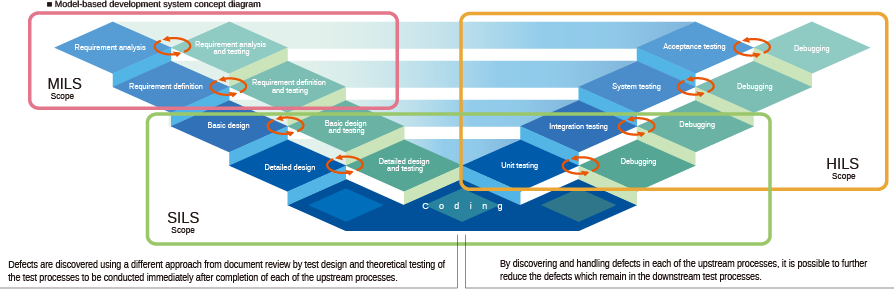
At present, the V-shaped model is widely prevalent in the development process in the automotive field, and simulation is being used in each of its processes, contributing to reduction in the development time and improvement in the product quality. We provide development support for simulation environment used in each process in the V-shaped model (or W-shaped model) such as MILS, SILS, PILS, HILS and RP, as well as development support for simulators in the automotive field, and simulators related to MFPs.

MILS system development support
MILS (Model In the Loop Simulation) is an advanced system in which the device which is to be controlled (plant) and the controller are modelled on Simulink, and the feedback controls between the plant and controller are simulated on the model, and by doing so, the controls can be developed and verified without using actual machines.
We have rich experience and knowhow to demonstrate our capability in providing development support for this MILS system.
Development experience
| Development languages | C#, C++, C, script (MATLAB m files) |
|---|---|
| Development tools | MATLAB/Simulink, Simulink Coder (formerly Real-Time Workshop), Visual Studio |
| Related keywords | Simulink custom block, S-Function, WCF |
SILS system development support
SILS (Software In the Loop Simulation) is a system in which the device which is to be controlled (plant) is a Simulink model, and the controller is described using software such as C source and used for simulation.
Development experience
| Development languages | C++, C |
|---|---|
| Development tools | MATLAB/Simulink, Simulink Coder (formerly Real-Time Workshop), Visual Studio |
| Related keywords | Virtual I/O board, controller peripheral circuit virtualization, S-Function, Simulink custom block |

RCP system development support
Rapid prototyping is a development technique in which a model created on MATLAB/Simulink is loaded on a trial version of the hardware and its working is verified by connecting actual devices to be controlled ( sensors, actuators, etc.) .
We do provide development support for the rapid prototyping system, but we are primarily engaged in the development of connection tools between a Simulink model and trial version hardware, and customization of codes which have been automatically generated by
Simulink Coder for models.
Development experience
| Development languages | C++, C |
|---|---|
| Development tools | MATLAB/Simulink, Simulink Coder (formerly Real-Time Workshop), Visual Studio |
| Related keywords | MATLAB TLC, MATLAB TMF |
HILS system development support
HILS (Hardware In the Loop Simulation) is a system in which simulation is carried out by using a simulator for the device which is to be controlled (plant), and an actual machine for the controller. It enables development and verification in an environment which closely resembles an actual machine.
Development experience
| Development languages | C++, C, Assembler |
|---|---|
| Development tools | gcc, Renesas HEW, Xilinx ISE/EDK |
| Development I/O board | AD/DA, DI/DO, generic pulse I/O, engine pulse, CAN, LIN, serial, motor, buck-boost |
| Related keywords | PIO, DMA, PCI, PCIe, Multi-core |

MFP simulator development support
We undertake development primarily of simulator control GUI, parameter setting tools and simulation result display and verification tools as part of our development support for simulators used for theoretical study of delivery routes for MFPs.
Development experience
| Development languages | C++, Python, VBA |
|---|---|
| Development tools | Visual Studio, Excel |
| Related keywords | Delivery route, heater, motor, position sensor |